Title here
Summary here
Our UAV is equipped with the RPLidar A2 sensor;, a lightweight and fast-scanning LiDAR designed specifically for aerial obstacle avoidance applications. The sensor features a rotating disc mechanism capable of generating a 2D planar scan at a rapid update rate. With the RPLidar A2, the UAV continuously scans its surroundings and updates its obstacle map every 100 ms;. This high-frequency update cycle enables quick response to fast-approaching obstacles, enhancing flight safety and navigational autonomy.
For dynamic obstacle avoidance, our system employs the horizontal Bendy Ruler algorithm;. This strategy enables the UAV to immediately sidestep incoming obstacles horizontally and pivot around them, minimising the risk of collision. we selected the horizontal variant over the vertical Bendy Ruler to avoid the complexities associated with predicting the pitch and roll attitudes of fast-moving aerial objects. A demonstration of this maneuver is shown in the following figure.
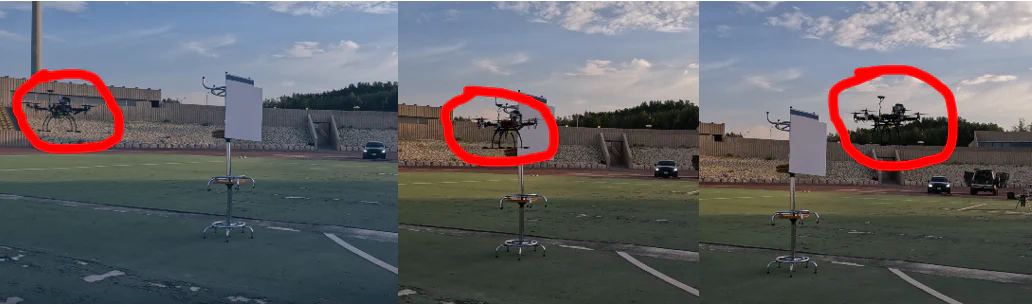
Sequential images show the UAV dynamically adjusting its flight path to avoid an obstacle during field testing.
To complement real-world testing, we also validated the obstacle avoidance strategy through mission planner simulations, as shown in Figure 16.
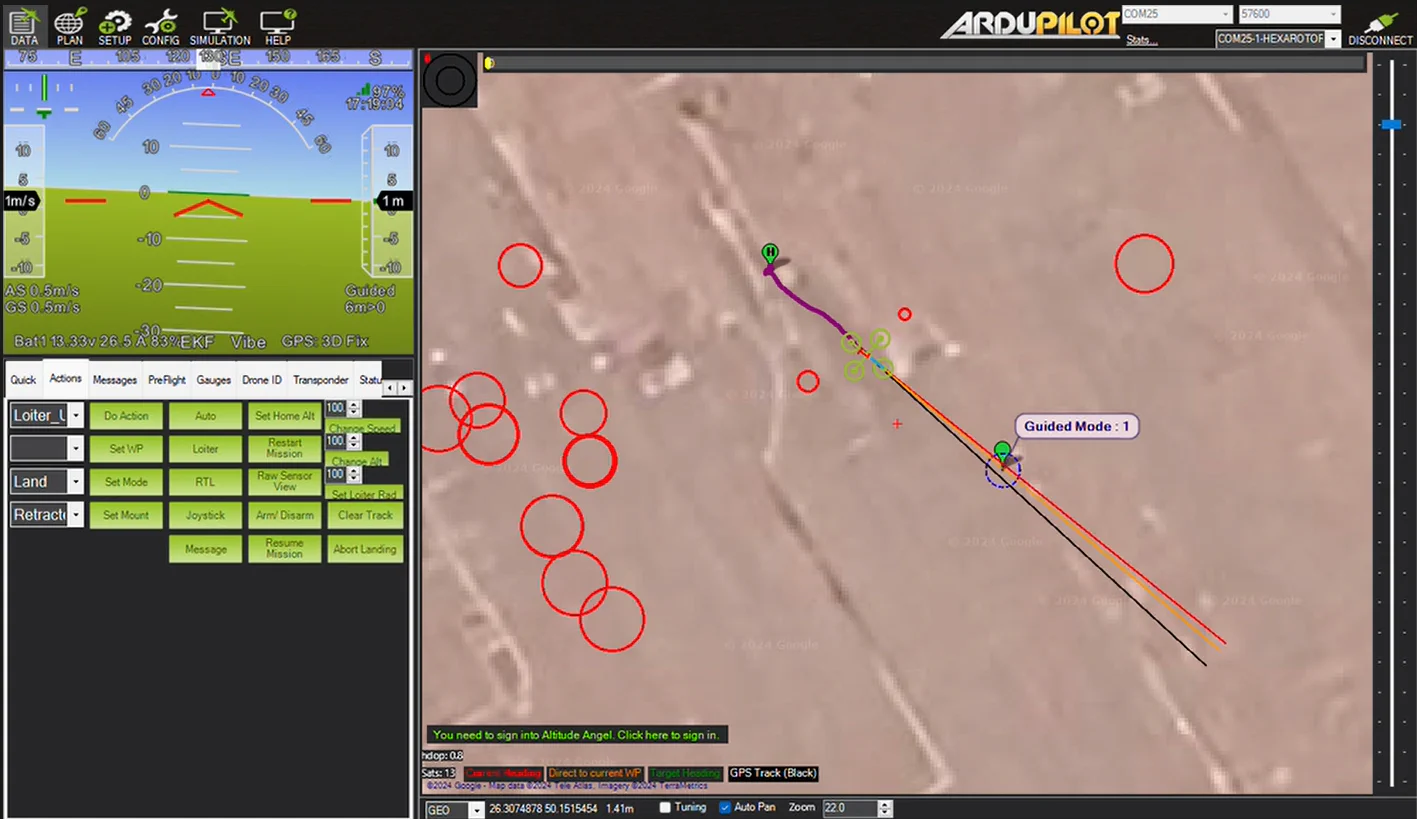
bendy mission planner
To maximize field-of-view and minimize signal interference, the RPLidar sensor is mounted atop the UAV airframe;. This placement ensures an unobstructed scanning environment while avoiding disruptions to the GPS signal — crucial for maintaining high-accuracy positional tracking during obstacle avoidance maneuvers.
The integration of the RPLidar A2 sensor, the real-time scanning capabilities, and the efficient obstacle avoidance strategy ensures the UAV’s capability to safely navigate through complex and dynamic aerial environments.