Title here
Summary here
The flight control system of our hexacopter is centered around the Cube Orange+ flight controller running ArduPilot firmware version 4.4. This controller manages all core flight operations including stabilization, navigation, and mode transitions.
A Jetson Orin Nano serves as the companion computer, responsible for onboard processing tasks such as computer vision and telemetry integration. The drone communicates with the ground control station via a Herelink RC system, which handles both manual control and telemetry streaming.
The Ground Control Station (GCS) is based on Mission Planner, allowing for mission planning, parameter tuning, and live telemetry monitoring.
These components work in tandem to provide exceptional reliability, ensuring stable flight control and rapid recovery from unforeseen events. The Cube Orange+ has been fully integrated with our ground control systems to deliver seamless autonomous operations
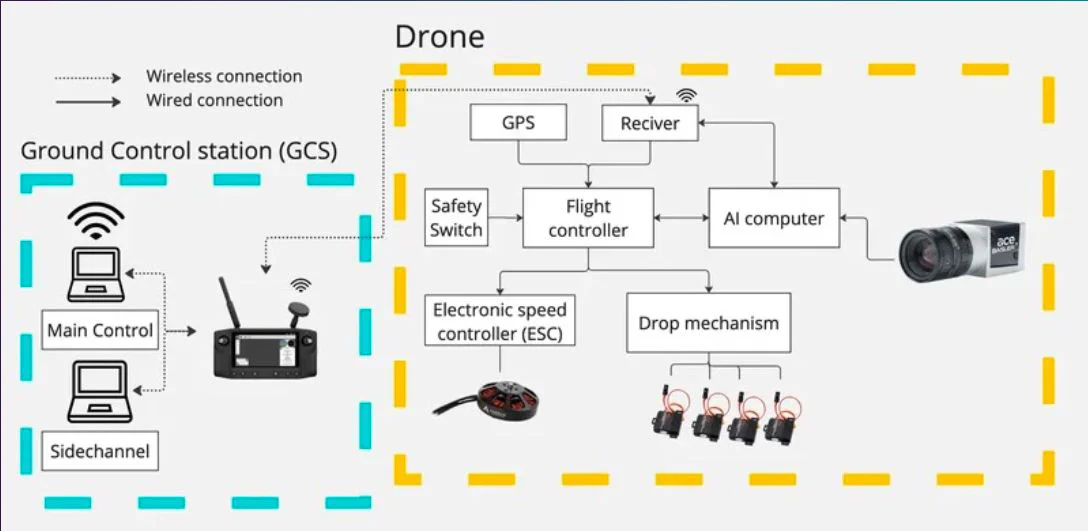
Communication System Architecture.
The drone operates in two primary modes during the mission:
AUTO Mode: Used for fully autonomous waypoint-based missions. Once initiated, the drone navigates between pre-programmed waypoints, performs tasks like imaging or object detection, and returns to launch autonomously.
LOITER Mode: Used for manual intervention. The safety pilot can transition to Loiter mode via the RC controller in case of anomalies or required human override. This mode stabilizes the drone’s position using GPS and altitude hold, allowing safe manual control.
Mode transitions are explicitly controlled by the Herelink RC system to ensure quick and reliable intervention during autonomous operations.
Using the Mission Planner software suite, our team precisely configures and tunes critical flight parameters such as approach velocity, return-to-launch altitude, and geofencing limits. This platform also supports live telemetry monitoring, log-based diagnostics, and in-flight tuning.
Over the past year, we have conducted a total of 40 flight tests;, 10 of which were manually piloted to validate fallback procedures and hardware redundancy. Manual flights averaged 12 minutes in duration, while 30 autonomous flights made up the majority of testing. This accumulated to 485 total flight minutes;, of which 363 minutes were fully autonomous.
Through rigorous field evaluations and extensive log-based review, our autopilot demonstrated strong compatibility with the mission planner, telemetry systems, and RC override. During autonomous missions, we configured waypoint sequences using the mission planner and evaluated positional accuracy through telemetry logs
Flight Statistic; | Value |
Total Flights | 40 |
Manual Flights | 10 |
Average Manual Flight Time | 12 minutes |
Total Flight Time | 485 minutes |
Autonomous Flight Time | 363 minutes |
Summary of Autopilot Testing Flights
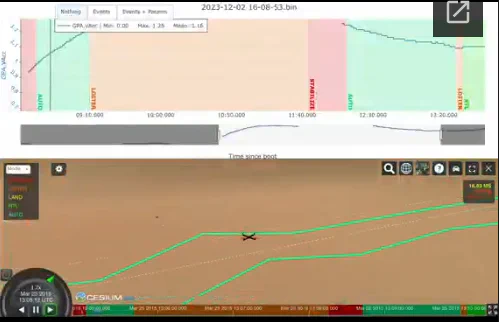
Log viewer visualization of real-time autopilot data.
A total of 600 waypoints were executed throughout the flight testing phase, averaging 20 waypoints per autonomous flight;. The system maintained a 100% waypoint hit rate;, and onboard telemetry revealed negligible average waypoint miss error;, indicating consistent navigational precision.
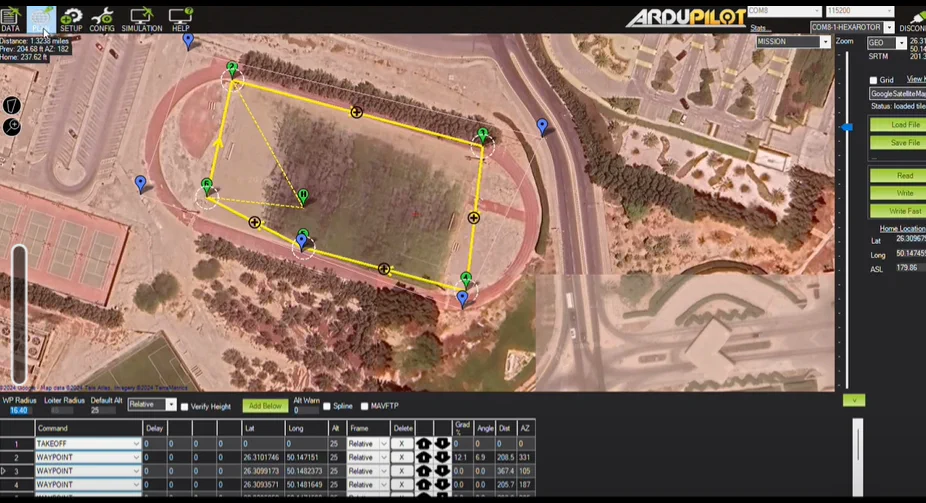
Cumulative waypoint success metrics across autonomous flights.
Waypoints are uploaded using Mission Planner prior to the mission. The flight plan is designed to comply with mission constraints and objectives, including obstacle avoidance, search patterns, and target acquisition zones.
The drone utilizes GPS and inertial measurements to follow the waypoints with precision. Navigation parameters such as WP_RADIUS, and LOITER_RADIUS were tuned to achieve stable and accurate path following during flight tests. These results confirm the robustness of the Cube Orange+ as a reliable and high-performance solution for the SUAS competition, ensuring precision guidance and safe operation across all mission phases.
Flight stability is maintained through ArduPilot’s onboard PID controllers for roll, pitch, yaw, and altitude. Tuning was conducted through a combination of simulation (SITL) and real-world testing, optimizing the balance between responsiveness and stability.
Motor mixing and frame geometry were configured specifically for the hexacopter layout (X configuration), ensuring even thrust distribution and yaw authority.
Stability was validated using flight logs analyzed via Mission Planner and ArduPilot log review tools, confirming minimal oscillations and consistent altitude hold under varying conditions.
The following failsafe mechanisms were configured and tested:
Manual override is always available via the Herelink system, allowing the safety pilot to take control instantly in case of anomalies.