Title here
Summary here
We considered multirotor, VTOL, and fixed-wing configurations. Fixed-wing designs were rejected due to limited drop accuracy and ODLC image quality. At the same time, VTOLs were dismissed because of their large turning radius at high speeds and complex mode transitions. Multirotors provided tight manoeuvrability, reliable payload deployment, and better compatibility with the competition’s confined airspace, making them the optimal choice as shown in the following figure.
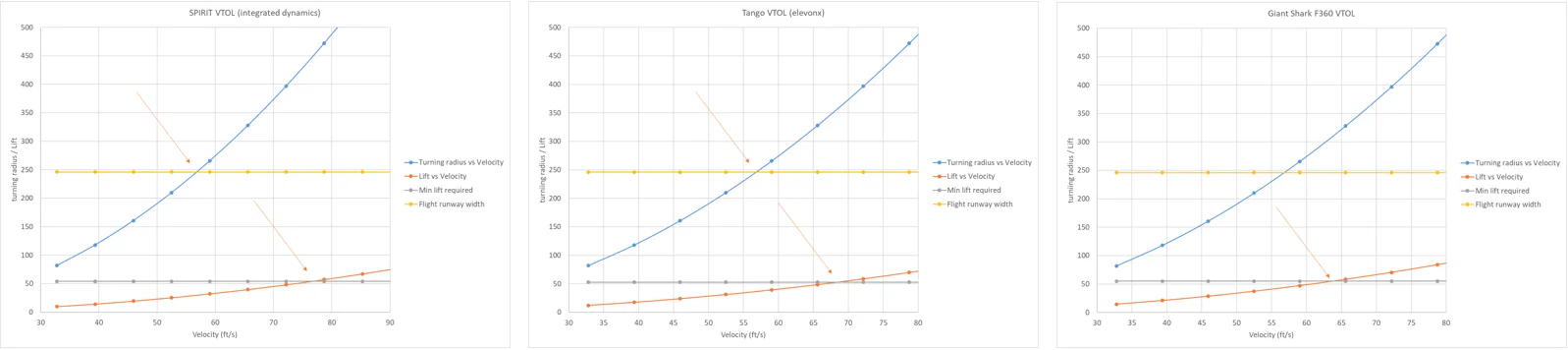
multi-rotor, VTOL, and fixed-wing configurations.

Evaluated gimbal options. The passive gimbal option (right) was chosen over the motorized version for its lightweight and efficiency.
For the camera system, as in previous figure, we evaluated using a motorised gimbal, but ultimately chose a passive gimbal. The passive design reduced the gimbal weight by over 50%, eliminated power consumption, and improved flight endurance, making it more suitable for our mission requirements.